
Інтэлектуальны чатырохногі робат


Уводзіны
Абнаўленне алгарытму: больш спрытныя і гнуткія рухі
Дасягнуць большай здольнасці пераадольваць перашкоды і выконваць рухі высокай складанасці
1. Можа пераскокваць траншэі, скакаць высока, выконваць сальта наперад і іншыя рухі высокай складанасці.
2. Падняцца па прыступках вышынёй 15 см, што амаль максімальна дасягальна для чатырохногіх робатаў такога ж памеру.
3. Падтрымлівайце сальта назад, павароты цела, скачкі з кручэннем, маханне рукой, месяцовую хаду, перакульванне і ўставанне і г.д.
Маштабаваная эвалюцыя
Модульная канструкцыя для неабмежаванага пашырэння
Карысная нагрузка 1,4,5 кг пры хадзе значна пашырае прастору пашырэння
2. Забяспечце інтэрфейсы распрацоўкі пашыраных магчымасцей успрымання (SDK і API)
3. З адкрытай модульнай структурай і інтэрфейсамі, падтрымкай усталёўкі модуляў RTK, 5G, хостаў штучнага інтэлекту, перыферыйных працэсараў і розных датчыкаў
4. Абсталяваны лідарам і глыбіннай камерай, што дазваляе паглыблена развіваць перадавыя магчымасці ўспрымання, такія як аўтаномная навігацыя, аўтаматычнае спыненне і пазбяганне перашкод, візуальнае пазіцыянаванне і рэканструкцыя навакольнага асяроддзя.
Павелічэнне крутоўнага моманту ў суставах на 50%: магутная сіла для рухаў
Уласна распрацаваныя модулі шарнірнага прывада з высокім крутоўным момантам адрозніваюцца звышвысокай шчыльнасцю крутоўнага моманту, прапускной здольнасцю рэагавання і эфектыўнасцю зваротнай перадачы
Павелічэнне максімальнай карыснай нагрузкі пры хадзе на 1,40%
2. Амаль удвая павялічаная цягавітасць да руху, з часам бесперапыннага руху 90 хвілін і далёкасцю дзеяння 5 км
Трохразовае павелічэнне вылічальнай магутнасці сістэмы кіравання прамысловага класа
Выкарыстоўвайце прамысловае інерцыяльнае кіраванне (IMU) для ўсебаковага павышэння стабільнасці і вылічальнай магутнасці.
1. Першае ўкараненне сістэмы кіравання ў рэжыме рэальнага часу прамысловага класа з глыбока аптымізаваным ядром
2. Агульная вылічальная магутнасць павялічылася амаль у 3 разы
3. З высокай хуткасцю сувязі ў рэжыме рэальнага часу і частатой кіравання да 1 кГц
Цалкам мадэрнізаваная сістэма ўзаемадзеяння чалавека і машыны
1. Палепшаная прадукцыйнасць перадачы выявы ў рэжыме рэальнага часу з першага прагляду і паменшанай затрымкай
2. Дададзена лёгкае ўзаемадзеянне з мовай, якое дазваляе карыстальнікам атрымліваць розныя статусы чатырохногага робата ў рэжыме рэальнага часу.
3. Больш бяспечныя і разнастайныя рухі, заснаваныя на ўспрыманні
4. Падтрымка спынення, распазнавання і перамяшчэння перад перашкодамі спераду і ззаду, пазбягання перашкод спераду, аўтаномнай навігацыі і іншых функцый
Тэхнічныя параметры
| 1. Апаратная платформа | |
| Памер стоячы | Даўжыня 610 мм ± 10 мм, Шырыня 370 мм ± 10 мм, Вышыня 445 мм ± 10 мм |
| Памер лежачы | Даўжыня 680 мм ± 10 мм, Шырыня 370 мм ± 10 мм, Вышыня 175 мм ± 10 мм |
| Агульная вага (з акумулятарам) | прыблізна 12,2 кг |
| Вынослівасць без нагрузкі | 1,5 гадзіны ~ 2 гадзіны, дыяпазон: 4 км |
| Робат выкарыстоўвае поўны алгарытм кантролю сілы для падтрымання раўнавагі. Ён можа рэалізоўваць трохмернае вымярэнне сілы на ступні без выкарыстання датчыкаў ціску на падэшву на 360°, што забяспечвае нізкі знос ступні і нізкія выдаткі на абслугоўванне. | |
| Матэрыял | Сцёгны: алюмініевы сплаў; хваставікі: высокатрывалы кампазітны пластык; алеі: гума, якая паглынае ўдары, супрацьслізготная і зносаўстойлівая. |
| батарэя | Абсталяваны падключаемым літыевым акумулятарам; ёмістасць акумулятара ≥4400 мАг, намінальная энергія ≥126,7 Вт·г; час зарадкі: 40 хвілін ~ 1 гадзіна. |
| Глыбіня рэзкасці | Агульная колькасць ступеней свабоды (ГС): 12; ГС на кожную ножку: 3. |
| сумесны модуль | Выкарыстоўвае інтэграваны злучальны модуль з вонкавым дыяметрам ≤76 мм; складаецца з рухавіка з высокай шчыльнасцю крутоўнага моманту, высокадакладнага рэдуктара, абсалютнага энкодэра і датчыка тэмпературы. |
| Убудаваны выхад харчавання (5 В/12 В/24 В) і інтэрфейсы сувязі (Ethernet/WiFi) для зручнага другаснага развіцця. | |
| Рэжымы абароны | мяккі аварыйны прыпынак, сігналізацыя нізкага напружання, сігналізацыя перагрэву. |
| 2. Кіраванне рухам |
| Выкарыстоўвае інерцыяльны датчык прамысловага класа; дазвол акселерометра да 0,09 мг, дазвол гіраскопа да 0,004°/с. |
| Частата кіравання шынай сувязі: 1 кГц. |
| Забяспечвае стабільную хаду і хуткую хаду |
| Падтрымлівае хаду, у тым ліку ўздым па лесвіцы, схілы, поўзанне; максімальны нахіл ўздыму: 40° (у залежнасці ад матэрыялу схілу); максімальная бесперапынная вышыня лесвіцы: 15 см; адаптуецца да бетонных дарог, гравійных дарог і г.д. |
| Карысная нагрузка пры бесперапыннай хадзе: да 4,5 кг. |
| Падтрымлівае крокі на месцы, перамяшчэнне наперад/назад/налева/направа, паварот налева/направа. |
| Забяспечвае розныя дэманстрацыйныя дзеянні: скачок наперад, скачок з паваротам, хаду па месяцовым ходу і г.д.; максімальная адлегласць скачку наперад: 50 см. |
| Спрыяе развіццю іншых высокапрадукцыйных хадоў і рухаў |
| 3. Інтэлектуальнае ўспрыманне |
| Шырокавугольная камера*1: гарызантальны кут агляду 130°; 1920×1080 пры 30 кадрах у секунду; антыблікавае пакрыццё, без скажэнняў; падтрымлівае распрацоўку алгарытмаў распазнавання цела чалавека і адсочвання. |
| ультрагукавыя радары*2: падтрымка выяўлення адлегласці і распрацоўка алгарытмаў спынення перашкод. |
| Абсталяваны сістэмай пазбягання перашкод спераду і ззаду. |
| 4. Другаснае развіццё |
| Прапануе мадэль робата, SDK і API руху, дэманстрацыю распрацоўкі руху і падрабязныя інструкцыі па другаснай распрацоўцы. |
| Забяспечвае інтэрфейсы праграмнага забеспячэння для распрацоўкі ўспрымання з падрабязнымі інструкцыямі карыстальніка і распрацоўкі; убудаваная сістэма ROS для хуткай другаснай распрацоўкі. |
Прадстаўленне кампаніі
У 2008 годзе ў Пекіне была заснавана кампанія Beijing Hewei Yongtai Technology Co., LTD. Яна спецыялізуецца на распрацоўцы і эксплуатацыі спецыяльнага абсталявання бяспекі, у асноўным абслугоўвае заканадаўства аб грамадскай бяспецы, узброеную паліцыю, вайскоўцаў, мытню і іншыя ведамствы нацыянальнай бяспекі.
У 2010 годзе ў Гуаньнані была заснавана кампанія Jiangsu Hewei Police Equipment Manufacturing Co., LTD. Яна займае плошчу ў 9000 квадратных метраў майстэрні і офіснага будынка і мае на мэце стварэнне ў Кітаі першакласнай базы даследаванняў і распрацовак спецыяльнага абсталявання бяспекі.
У 2015 годзе ў Шэньчжэне быў створаны ваенна-паліцэйскі даследчы і распрацоўчы цэнтр. Ён сканцэнтраваны на распрацоўцы спецыяльнага абсталявання бяспекі і распрацаваў больш за 200 відаў прафесійнага абсталявання бяспекі.






Замежныя выставы


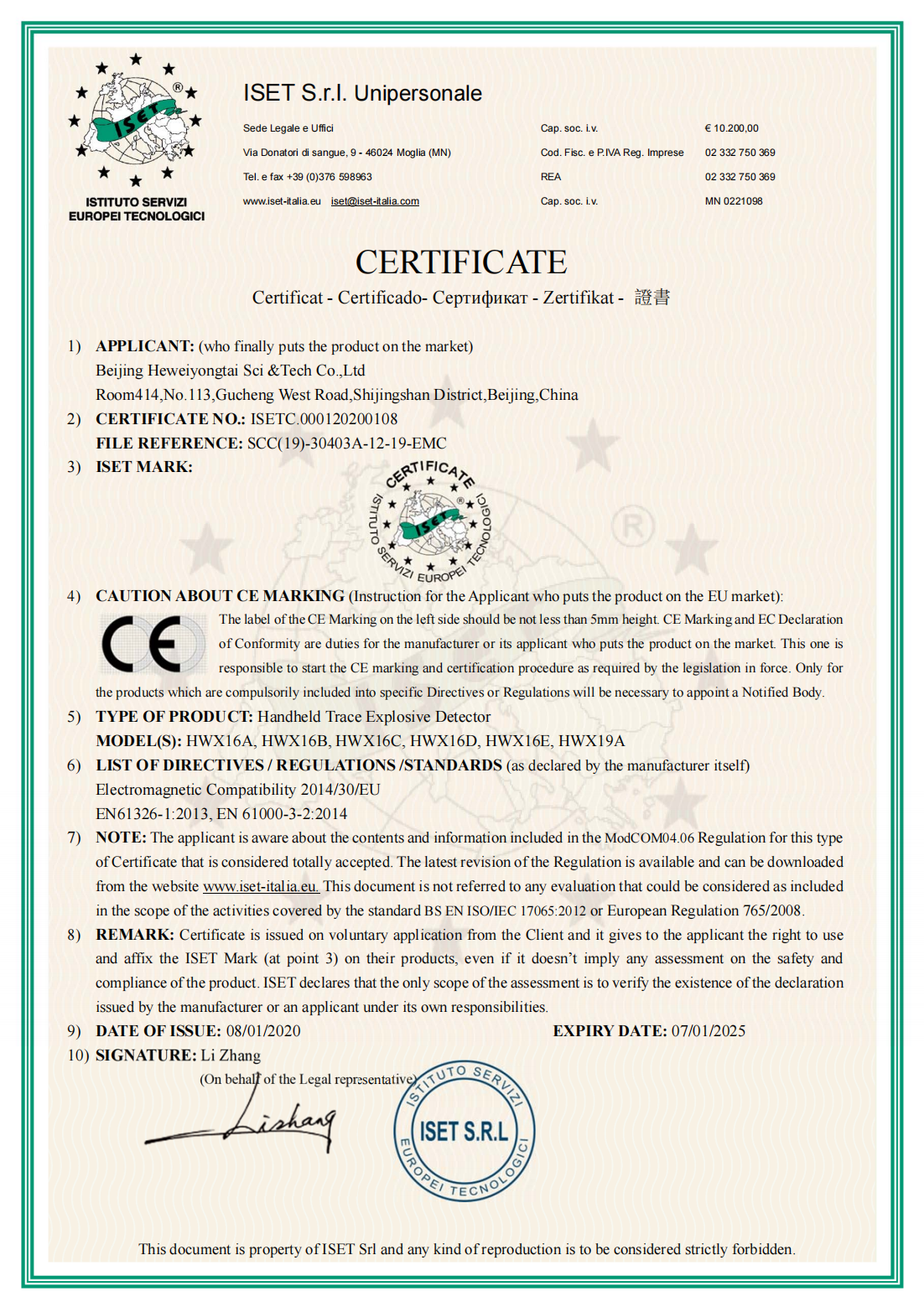
Сертыфікаты

Пекінская навукова-тэхнічная кампанія «Пекінскі Хэвэйёнтай» з'яўляецца вядучым пастаўшчыком рашэнняў для выбуховых сродкаў і бяспекі. Нашы супрацоўнікі — гэта кваліфікаваныя тэхнічныя і кіраўніцкія спецыялісты, якія гатовыя забяспечыць вам абслугоўванне, якое задаволіць вас.
Усе прадукты маюць нацыянальныя прафесійныя справаздачы аб выпрабаваннях і сертыфікаты аўтарызацыі, таму, калі ласка, будзьце ўпэўненыя, заказваючы нашы прадукты.
Строгі кантроль якасці для забеспячэння працяглага тэрміну службы прадукцыі і бяспечнай працы аператара.
Маючы больш чым 10-гадовы вопыт работы ў галіне абсталявання для выбуховых прылад, барацьбы з тэрарызмам, разведвальных прылад і г.д.
Мы прафесійна абслугоўвалі кліентаў з больш чым 60 краін па ўсім свеце.
Няма мінімальнага замовы для большасці тавараў, хуткая дастаўка для тавараў на заказ.




